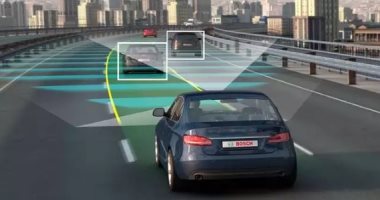








طور باحثون من معهد ماساتشوستس للتكنولوجيا (MIT) نظامًا جديدًا للسيارات ذاتية القيادة قادرًا على التنقل في أوضاع الرؤية الضعيفة، بما في ذلك الضباب والثلوج، حيث يعتمد النظام على استخدام رادار الأرض (LGPR)، والذي يأخذ قراءات شكل وتكوين الطريق أسفل وحول السيارة مباشرة مع النبضات الكهرومغناطيسية، كما تستخدم أنظمة السيارة ذاتية القيادة مزيجًا من اللادار، وهو تحديد المدى عن طريق الضوء أو الليزر، جنبا إلى جنب الرادار والكاميرات لتطوير نموذج بمكان وجود السيارة تحديدا.
ووفقا لما ذكرته صحيفة "ديلى ميل" البريطانية، فإن هذه الأنظمة كانت جيدة عمومًا ولكنها عرضة للخدع المرئية مثل إشارات الطرق المزيفة وصانعي الممرات، ويمكن أن تصبح أقل موثوقية بشكل ملحوظ خلال الظروف الجوية السيئة.
ولكن يهدف نظام LGPR إلى تحسين مواطن الضعف هذه من خلال التركيز على الطريق نفسه وليس على المساحة المفتوحة أمام السيارة.
ويحتاج نظام LGPR إلى الوصول إلى بيانات GPS حول الطرق التي يسافر بها، بالإضافة إلى مجموعة مرجعية من بيانات LGPR للمقارنة مع قراءات المستشعر المباشر من السيارة.
وأرسل فريق MIT سيارة مع سائق لإنشاء مجموعة مرجعية من بيانات LGPR، والتي تعرض التغييرات الطفيفة في ارتفاع الطريق أو الحفر أو غيرها من التفاصيل الدقيقة التي تشكل نوعًا من الخريطة النصية التي تشبه بصمات الأصابع للطريق.
وقال تيدي أورت من معهد ماساتشوستس للتكنولوجيا: "إذا استخدمنا مجرفة وحفرنا بها الأرض، فكل ما سنراه هو حفنة من الأوساخ"، مضيفا "لكن يمكن لـ LGPR تحديد العناصر المحددة هناك ومقارنتها بالخريطة التي تم إنشاؤها بالفعل، حتى تعرف بالضبط مكانها دون الحاجة إلى الكاميرات أو الليزر."
ويجمع النظام بين بيانات نظام تحديد المواقع العالمي (GPS) وبيانات LGPR حول تكوين الجزء الدقيق من الطريق الذي يتم نقله لإجراء اختيارات ملاحية حول سرعة السفر ومتى يتم الإسراع أو الإبطاء.
كما أن البيانات المستخدمة لأنظمة LGPR هي أيضًا أقل بكثير من البيانات ثلاثية الأبعاد الكاملة المستخدمة في أنظمة القيادة الذاتية التقليدية، ولكن يعترف الفريق بأن النظام لا يزال مبكرا في تطويره وقد يكون جاهزًا بعد سنوات عديدة.